


In recent times, researchers within the discipline of robotic reinforcement studying (RL) have achieved vital progress, growing strategies able to dealing with complicated picture observations, coaching in real-world eventualities, and incorporating auxiliary information, comparable to demonstrations and prior expertise. Regardless of these developments, practitioners acknowledge the inherent problem in successfully using robotic RL, emphasizing that the precise implementation particulars of those algorithms are sometimes simply as essential, if no more so, for efficiency as the selection of the algorithm itself.
The above picture is depiction of assorted duties solved utilizing SERL in the true world. These embody PCB board insertion (left), cable routing (center), and object relocation (proper). SERL gives an out-of-the-box package deal for real-world reinforcement studying, with assist for sample-efficient studying, discovered rewards, and automation of resets.
Researchers have highlighted the numerous problem posed by the comparative inaccessibility of robotic reinforcement studying (RL) strategies, hindering their widespread adoption and additional growth. In response to this concern, a meticulously crafted library has been created. This library incorporates a sample-efficient off-policy deep RL technique and instruments for reward computation and surroundings resetting. Moreover, it features a high-quality controller tailor-made for a broadly adopted robotic, coupled with a various set of difficult instance duties. This useful resource is launched to the neighborhood as a concerted effort to handle accessibility considerations, providing a clear view of its design choices and showcasing compelling experimental outcomes.

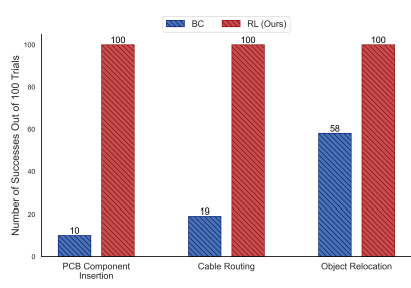
When evaluated for 100 trials per job, discovered RL insurance policies outperformed BC insurance policies by a big margin, by 1.7x for Object Relocation, by 5x for Cable Routing, and by 10x for PCB Insertion!
The implementation demonstrates the aptitude to realize extremely environment friendly studying and acquire insurance policies for duties comparable to PCB board meeting, cable routing, and object relocation inside a mean coaching time of 25 to 50 minutes per coverage. These outcomes symbolize an enchancment over state-of-the-art outcomes reported for comparable duties within the literature.
Notably, the insurance policies derived from this implementation exhibit excellent or near-perfect success charges, distinctive robustness even beneath perturbations, and showcase emergent restoration and correction behaviors. Researchers hope that these promising outcomes, coupled with the discharge of a high-quality open-source implementation, will function a priceless device for the robotics neighborhood, fostering additional developments in robotic RL.
In abstract, the rigorously crafted library marks a pivotal step in making robotic reinforcement studying extra accessible. With clear design selections and compelling outcomes, it not solely enhances technical capabilities but additionally fosters collaboration and innovation. Right here’s to breaking down boundaries and propelling the thrilling way forward for robotic RL! 🚀🤖✨
Try the Paper and Undertaking. All credit score for this analysis goes to the researchers of this challenge. Additionally, don’t overlook to comply with us on Twitter and Google Information. Be part of our 36k+ ML SubReddit, 41k+ Fb Group, Discord Channel, and LinkedIn Group.
For those who like our work, you’ll love our e-newsletter..
Don’t Neglect to hitch our Telegram Channel


Janhavi Lande, is an Engineering Physics graduate from IIT Guwahati, class of 2023. She is an upcoming information scientist and has been working on the planet of ml/ai analysis for the previous two years. She is most fascinated by this ever altering world and its fixed demand of people to maintain up with it. In her pastime she enjoys touring, studying and writing poems.