


Reinforcement Studying (RL) has turn into a cornerstone for enabling machines to deal with duties that vary from strategic gameplay to autonomous driving. Inside this broad subject, the problem of growing algorithms that study successfully and effectively from restricted interactions with their setting stays paramount. A persistent problem in RL is attaining excessive ranges of pattern effectivity, particularly when information is restricted. Pattern effectivity refers to an algorithm’s means to study efficient behaviors from a minimal variety of interactions with the setting. That is essential in real-world purposes the place information assortment is time-consuming, expensive, or doubtlessly hazardous.
Present RL algorithms have made strides in enhancing pattern effectivity via progressive approaches reminiscent of model-based studying, the place brokers construct inside fashions of their environments to foretell future outcomes. Regardless of these developments, persistently attaining superior efficiency throughout numerous duties and domains remains difficult.
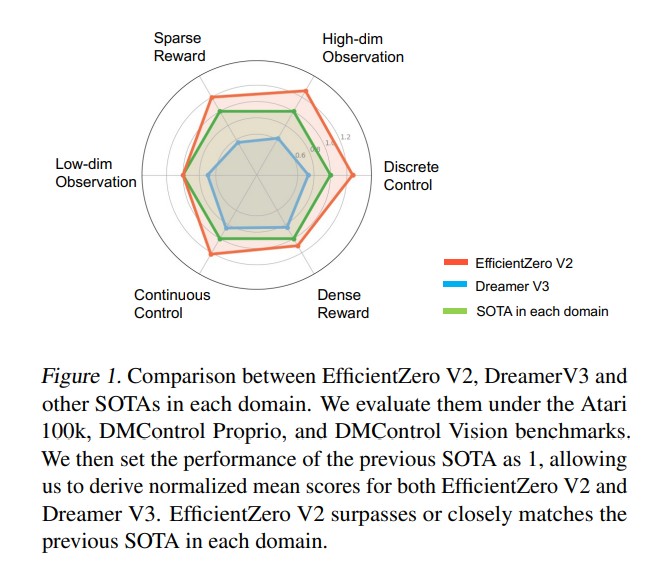
Researchers from Tsinghua College, Shanghai Qi Zhi Institute, Shanghai and Shanghai Synthetic Intelligence Laboratory have launched EfficientZero V2 (EZ-V2), a framework that distinguishes itself by excelling in each discrete and steady management duties throughout many domains, a feat that has eluded earlier algorithms. Its design incorporates a Monte Carlo Tree Search (MCTS) and model-based planning, enabling it to carry out properly in environments with visible and low-dimensional inputs. This strategy permits the framework to grasp duties that require nuanced management and decision-making based mostly on visible cues, that are widespread in real-world purposes.
EZ-V2 employs a mix of illustration operation, dynamic operation, coverage operation, and worth operation, all represented by refined neural networks. These parts facilitate studying a predictive mannequin of the setting, enabling environment-friendly motion planning and coverage enhancement. Significantly noteworthy is the usage of Gumbel seek for tree search-based planning, tailor-made for discrete and steady motion areas. This technique ensures coverage enhancement while effectively balancing exploration and exploitation. Moreover, EZ-V2 introduces a novel search-based worth estimation (SVE) technique, using imagined trajectories for extra correct worth predictions, particularly in dealing with off-policy information. This complete strategy allows EZ-V2 to attain outstanding efficiency benchmarks, considerably enhancing the pattern effectivity of RL algorithms.
From an efficiency standpoint, the analysis paper particulars spectacular outcomes. EZ-V2 displays a development over the prevailing common algorithm, DreamerV3, attaining superior outcomes in 50 of 66 evaluated duties throughout numerous benchmarks, reminiscent of Atari 100k. This marks a major milestone in RL’s capabilities to deal with complicated duties with restricted information. Particularly, in capabilities grouped underneath the Proprio Management and Imaginative and prescient Management benchmarks, the framework demonstrated its adaptability and effectivity, surpassing the scores of earlier state-of-the-art algorithms.
In conclusion, EZ-V2 presents a major leap ahead within the quest for extra sample-efficient RL algorithms. By adeptly navigating the challenges of sparse rewards and the complexities of steady management, they’ve opened up new avenues for making use of RL in real-world settings. The implications of this analysis are profound, providing the potential for breakthroughs in varied fields the place information effectivity and algorithmic flexibility are paramount.